Motor configuration code



Arduino SimpleFOClibrary supports two types of BLDC motors:
- BLDC motors
- 3 phase (3 wire):
- Gimbal and High-performance BLDC motors
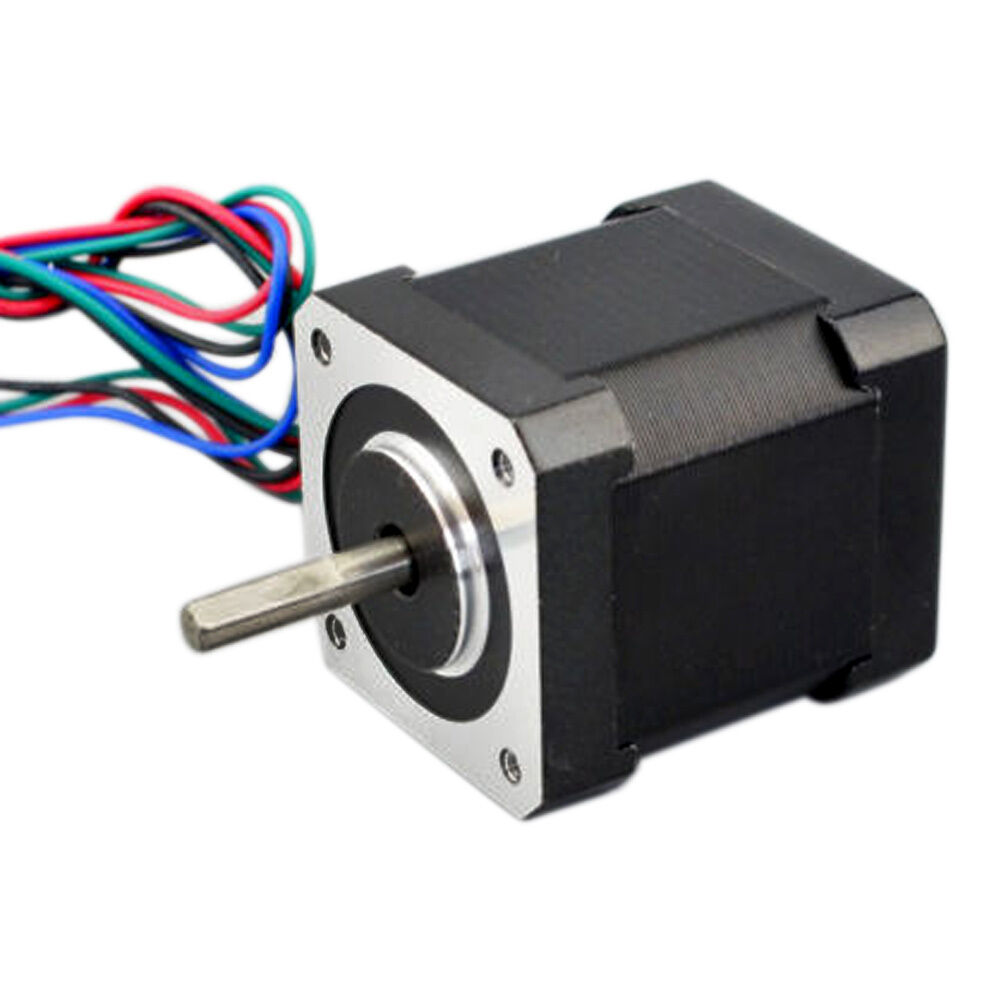
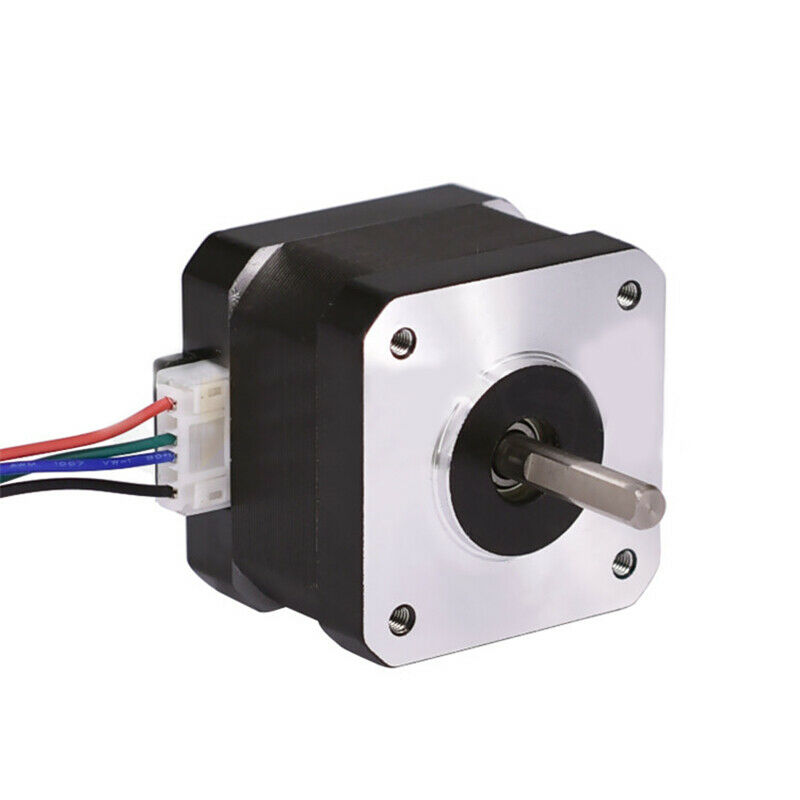
- Stepper motors
- 2 phase (4 wire)
The motor code is written in a way to support as many different motors out there as possible and in a way to be fully interchangeable.
Digging deeper
For more theoretical explanations and source code implementations of the FOC algorithm and the motion control approaches check out the digging deeper section.