Stepper motor control example
using L298N and Stm32 Nucleo-64
For this stepper motor control example we are going to be using this hardware:


Connecting everything together
Here is an example of the connection scheme using the L298N and Nucleo-64:

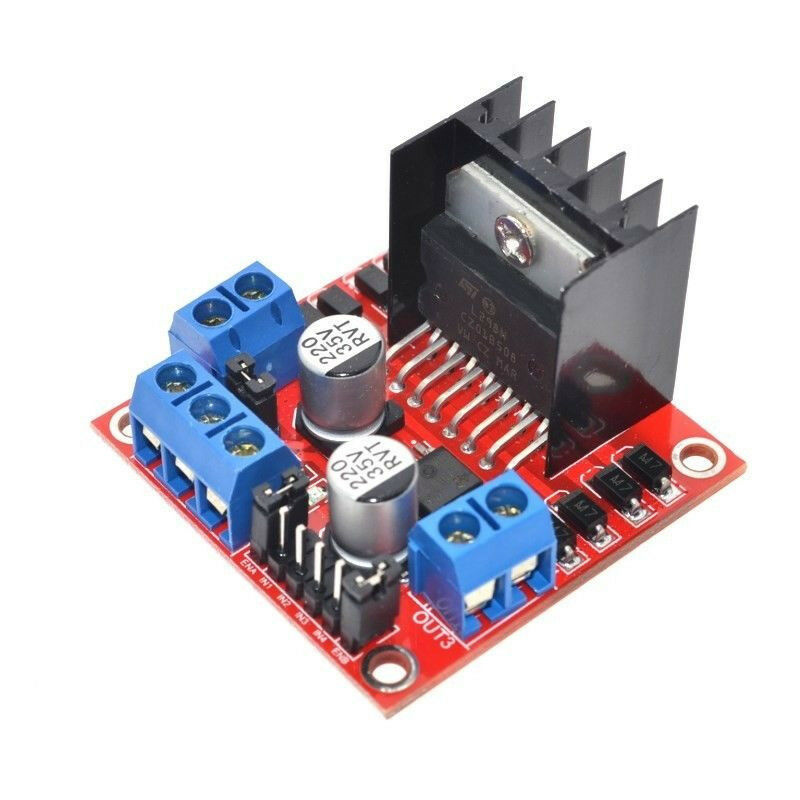
L298N
- Channels
ENAandENBare connected to pins7and8 - Channels
IN1,IN2,IN3andIN4are connected to the pins5,6,9,10 - Common ground is connected in between nucleo and L298N
- 12V power-supply is connected directly to the driver
Encoder
- Channels
AandBare connected to the pinsA0qndA1 - Index channel is not used in this example but you cqn easily modify this example to support it
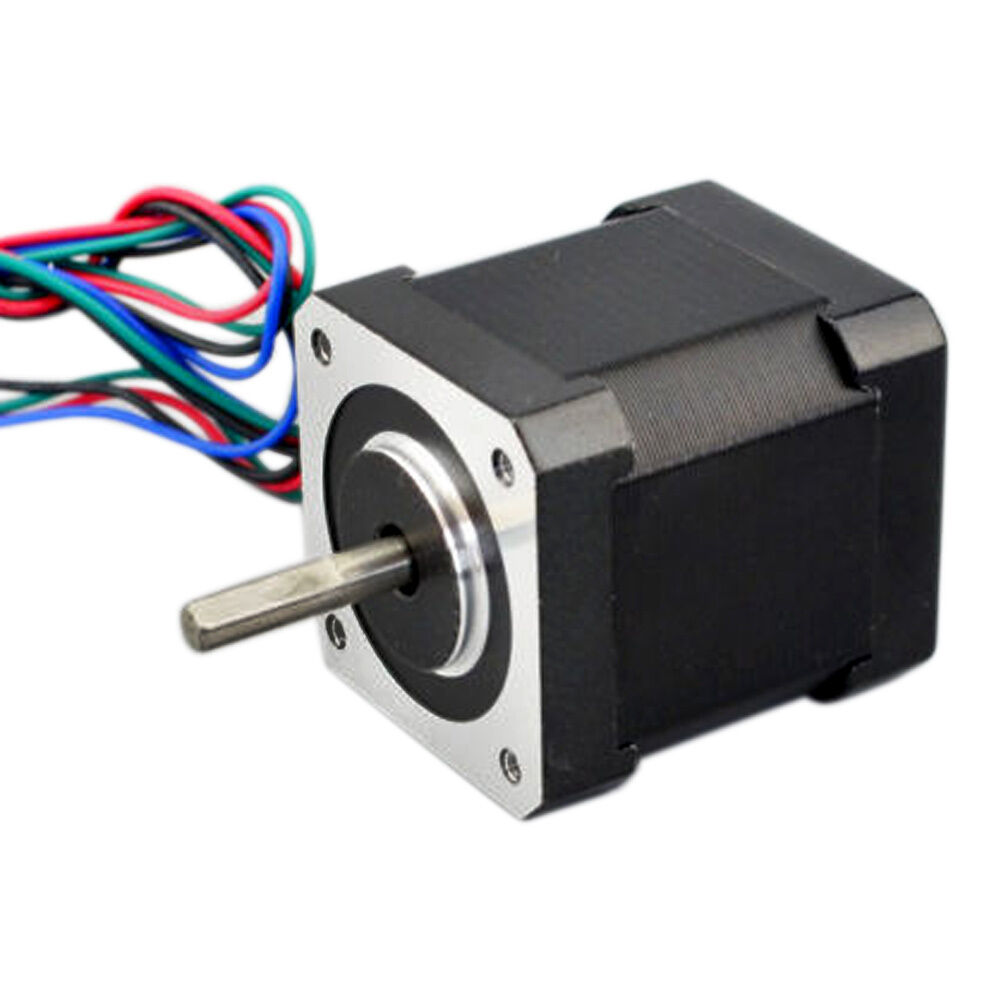
Motor
- Motor phases
A1,A2,B1andB2are connected directly the motor connectors of the L298N chip.
Full Arduino code
#include <SimpleFOC.h>
// Stepper motor instance
StepperMotor motor = StepperMotor(50);
// Stepper driver instance
StepperDriver4PWM driver = StepperDriver4PWM(5, 6, 9, 10, 8, 7);
// encoder instance
Encoder encoder = Encoder(A1, A2, 2048);
// channel A and B callbacks
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
// commander interface
Commander command = Commander(Serial);
void onMotor(char* cmd){ command.motor(&motor, cmd); }
void setup() {
// initialize encoder sensor hardware
encoder.init();
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// choose FOC modulation
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
// power supply voltage [V]
driver.voltage_power_supply = 12;
driver.init();
// link the motor to the sensor
motor.linkDriver(&driver);
// set control loop type to be used
motor.controller = MotionControlType::torque;
// controller configuration based on the control type
motor.PID_velocity.P = 0.2;
motor.PID_velocity.I = 20;
motor.PID_velocity.D = 0;
// default voltage_power_supply
motor.voltage_limit = 12;
// velocity low pass filtering time constant
motor.LPF_velocity.Tf = 0.01;
// angle loop controller
motor.P_angle.P = 20;
// angle loop velocity limit
motor.velocity_limit = 50;
// use monitoring with serial for motor init
// monitoring port
Serial.begin(115200);
// comment out if not needed
motor.useMonitoring(Serial);
// initialise motor
motor.init();
// align encoder and start FOC
motor.initFOC();
// set the initial target value
motor.target = 2;
// define the motor id
command.add('M', onMotor, "motor");
// Run user commands to configure and the motor (find the full command list in docs.simplefoc.com)
Serial.println(F("Motor commands sketch | Initial motion control > torque/voltage : target 2V."));
_delay(1000);
}
void loop() {
// iterative setting FOC phase voltage
motor.loopFOC();
// iterative function setting the outter loop target
// velocity, position or voltage
// if tatget not set in parameter uses motor.target variable
motor.move();
// user communication
command.run();
}